欢迎浏览厦门控匠自动化科技有限公司

行业资讯
穆格M型驱动安装 调优
时间: 2024-04-25浏览次数:
穆格M型驱动安装 调优
调优:
如果驱动系统对设定值或负载变化的响应不稳定或缓慢,则可能需要调整M-Drive。按照以下程序改进系统性能:
1. 将CP-66(积分)和CP-67(导数)设置为零。
2. 降低CP-65(增益),直到系统不稳定(不稳定)。稳定性可以通过在两个广泛的设定值之间移动来测试。当达到不稳定时,稍微增加CP-65的数量,直到系统稳定(较大的值会降低系统增益)。
3. 仅使用增益,由于系统损耗,可能永远无法达到系统设定值。减少CP-66(积分),直到系统变得不稳定,然后稍微增加积分数,直到系统稳定并达到所需的设定值。
4. 只有在设置增益和积分项后系统太慢时才需要导数(CP-67)。像增益一样,导数值应降低到不稳定的点,然后稍微增加,直到系统恢复稳定。
追随者操作:
完成主模式(第2页)的ìScalingî和ìTuningî程序,然后再进行Follower操作。要启用Follower操作,请遵循以下步骤:
连接添加:
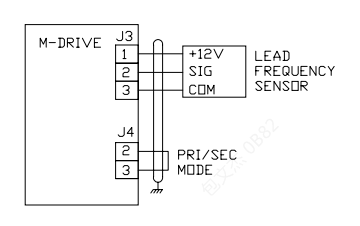
2. 输入引线(外部参考)传感器的每转脉冲数到CP-30 (PPR Ext Ref)。
3. 输入引线电机(或传感器轴,如果不直接连接到电机)的最大系统运行RPM到CP-36 (RPM Ref Secondary Max)。
4. M-Drive现在缩放比例从动器操作。设定值和显示值是跟随/领先的比例。
如果工程单元设定值和/或显示比以外的需要,请参阅ìM-Drive使用Manualî的第5章。
5. 在CP-3(从动器设定值)中输入所需的操作比。
