欢迎浏览厦门控匠自动化科技有限公司

行业资讯
力士乐DCK 定位块的参数化说明
时间: 2024-04-03浏览次数:
力士乐DCK 定位块的参数化说明
定位块的参数化说明:
考虑到驾驶限制
在参数化以下块时,必须考虑驱动器的最大值。这些都是:
•最大加速能力
•最大速度(与市电电压无关)
如果块的参数化要求值大于驱动器的最大值,那么这将产生过多的滞后错误。驱动器会发出错误信号F228,以指示偏差过大
它不符合位置命令值。
加速度和震动的最小值
加速度值过小也会导致问题,这就是为什么在固定定位块时要考虑以下问题。
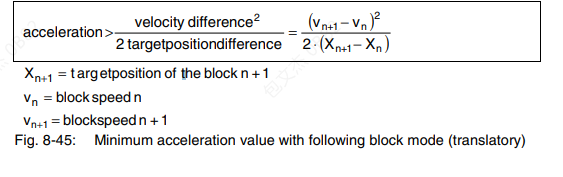
最小加速度值
注意:
上述关系适用于一个无限大的震动,它对应于一个已经关闭(=0)的震动过滤器。如果使用这样的过滤器,那么计算值必须在第一次近似中加倍。块体运行的距离和速度一般由工艺决定。如果用上述公式计算出的最小加速度值已经超过了上一节所述的最大值,则必须选择更低的定位块速度。
最小抖动值
如果参数化的加速度值太小,那么这可能意味着没有达到参数化的速度。其结果是一个“三角模式”。
